
但是,有些特殊地形(如山川、峡谷、河流等)外业人员很难布设像控点,为了减轻工作量,减少大部分像控点甚至是不需要像控点,就必需提高飞机pos点的精度,RTK技术和PPK技术均可达到厘米级精度。
下面我们就深度解析下,为啥
无人机都有了RTK还需要再配上PPK
从RTK和PPK这两种技术原理出发,进行对比分析
找出更适合应用于GPS空中定位的方法 。
RTK(Real Time Kinematic)测量系统一般由三部分组成:即GPS接收设备、数据传输系统和实施动态测量的软件系统。RTK测量技术是以载波相位观测量为根据的,有快速高精度定位功能的载波相位差分测量技术,它能够实时获得测站点在指定坐标系中的三维定位结果,且具有厘米级的定位精度。
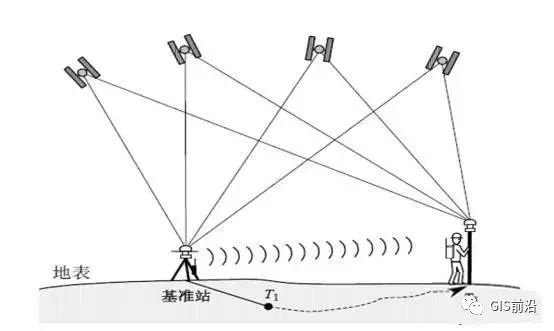
RTK测量的工作原理是:将一台接收机置于基准站上,另一台或几台接收机置于载体(称为移动站)上,基准站和移动站同时接收同一时间、同一GPS卫星发射的信号,基准站所获得的观测值与已知位置信息进行比较,得到GPS差分改正值。然后将这个改正值通过无线电数据链电台及时传递给共视卫星的移动站精化其GPS观测值,从而得到经差分改正后移动站较准确的实时位置。
目前主流的厂商RTK的定位平面精度可达8mm+1ppm,高程精度可达15mm+1ppm。基站与移动站之间的通讯方式主要有电台和网络两种,电台信号稳定,网络信号传输距离远,各有优点。
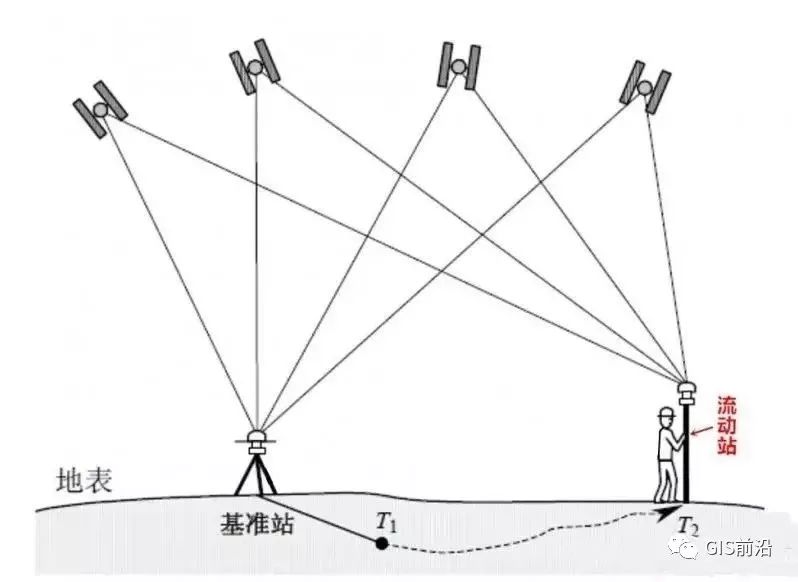
PPK(Post-Processing Kinematic,GPS动态后处理差分)技术的工作原理是利用一台进行同步观测的基准站接收机和至少一台流动接收机,对GPS卫星进行同步观测;也就是基准站保持连续观测,初始化后的流动站迁站至下一个待定点,在迁站过程中需要保持对卫星的连续跟踪,以便将整周模糊度传递至待定点。
基准站和流动站同步接收的数据在计算机中进行线性组合,形成虚拟的载波相位观测量,确定接收机之间的相对位置,最后引入基准站的已知坐标,从而获得流动站的三维坐标。
PPK技术是最早的GPS动态差分技术方式(又称半动态法、准动态相对定位法、走走停停(Stop and Go)法),它与RTK技术的主要区别在于:在基准站和流动站之间,不必象RTK那样,建立实时数据传输,而是在定位观测后,对两台GPS接收机所采集的定位数据进行测后的联合处理,从而计算出流动站在对应时间上的坐标位置,其基准站和流动站之间的距离没有严格的限制。它的优点是定位精度高、作业效率高、作业半径大、易操作。
RTK和PPK相同点
2. 两种技术在作业前都需要初始化。
3. 两者都能达到厘米级精度。水平精度为:1 cm+1 ppm;垂直精度为:2 cm+1 ppm。

▲表一 RTK与PPK的相同点
RTK和PPK不同点
2.定位作业的方式不同。RTK采用的实时定位技术,可以在流动站随时看到测量点的坐标以及精度情况;PPK定位属于后处理定位,在现场看不到点的坐标,需要事后处理才能看到结果。
3.作业半径不同。RTK作业受到通讯电台的制约,作业距离一般不超过10 km,网络模式的需要网络信号全覆盖的区域;运用PPK技术作业,一般作业半径可以达到50 km。
4.受卫星信号影响的程度不同。RTK作业时,如果在大树等障碍物的附近,非常容易失锁;而PPK作业时,经过初始化后,一般不易失锁。
5.定位精度不同。RTK平面精度8mm+1ppm,高程精度15mm+1ppm
PPK平面精度2.5mm+0.5ppm,高程精度5mm+0.5ppm。
6.定位频率不同。RTK基站发送差分数据和移动站接收的频率一般为1-2 HZ,PPK定位频率最大可达50HZ。