RTK四旋翼无人机使用经验总结
摘 要:近年来,随着无人机技术的不断发展,无人机航空摄影渐渐进入平民化时代。然而无人机的飞行安全和数据质量已成为限制其发展的重要因素。本文以大疆无人机的实际应用经验为基础,总结了RTK四旋翼无人机在航空摄影工作中的10个要点,涉及飞行计划制作、航摄外业和数据预处理三个方面,对于确保无人机航拍的飞行安全和数据质量具有重要的指导意义。同时,本文对于其他类型的无人机航空摄影也提供了参考价值。
关键词:RTK;无人机;航空摄影;飞行计划;飞行安全;数据质量
0引 言
目前无人机航空摄影已经成为测绘领域的重要技术手段。2018年以来,集成RTK的小型四旋翼无人机逐渐普及,大幅降低了无人机航空摄影的门槛和成本。RTK四旋翼无人机的灵活性和易用性,使其成为用户的首选,而且随着软硬件不断的更新迭代,无人机的操作也变得越来越简便,能够做到开箱即飞。
然而,这种简便性和易用性也带来了一些问题。无人机飞手常常会因为过于依赖无人机自检功能而失去高度的警惕性,忽视了飞行的安全问题。此外,一些航空摄影测量新进入者可能会忽略测绘工作的严谨性,导致航摄数据质量无法保障。
笔者使用多款大疆RTK四旋翼无人机累计完成了2500余平方公里面积的大比例尺精度的航空摄影任务,积累了丰富的无人机航空摄影内外业经验,形成了较为完善的免像控无人机航空摄影工作流程。本文旨在总结笔者及团队在无人机航空摄影方面的经验和技术,涉及飞行计划制作、航摄外业和数据预处理三个方面,为无人机航空摄影内外业的飞行安全和数据质量保障提供了重要的指导意义,并为其他类型的无人机航空摄影提供了参考。
1飞行计划制作
航空摄影的第一步是制作飞行计划,根据甲方的要求、搜集测区范围及周边的相关数据,在遥控自带的软件中输入相关参数,生成任务航线。飞行计划制作的好坏对航摄数据的质量起着决定性作用,因此需要格外重视。
1.1 航摄范围
无人机航空摄影使用的坐标系为WGS84或CGCS2000,因此用于制作飞行计划的航摄范围应与之一致。一般甲方会提供准确的矢量范围。此时需向甲方确定航摄范围的坐标系是否是WGS84或CGCS2000。若不是,需将其转换至WGS84或CGCS2000。因为无人机航空摄影任务通常面积较小,北京54和西安80坐标系与CGCS2000坐标系差值有数十米甚至上百米,若不做坐标系转换,采集的航摄数据可能会有所偏差,造成不必要的补摄。若甲方无法提供矢量范围,可根据甲方的描述在地图软件(例如图新地球)上圈定范围。虽然无人机遥控上也可以画定航摄范围,但由于其软件底图较为陈旧且操作不便,一般不建议使用此种方式。
若甲方需要带状数据,可使用遥控自带的航带飞行模式,可以按用户输入的距离自动切割航带。但需要注意的是,不管是带状还是面状,最终的航线数最少不宜低于3条,否则有可能会出现空三失败的情况。
1.2 重叠度
重叠度设置方面,一般要保证最高点的旁向及航向重叠度均不低于60%,以便之后空三加密能够顺利通过。高程越高,重叠度越低,反之亦然。因此确定重叠度之前需大致了解测区内的地物地貌的起伏情况。如果是平原,可通过卫星影像大致掌握测区内高大建筑的高程及分布情况;如果是山区,可根据公开的SRTM3高程模型数据较为准确的获取测区内的最高点和最低点。
在遥控器自带的软件输入的重叠度是起降点的重叠度,因此需要按照起降点和最高点的高差来计算在最高点的重叠度为60%时起飞点的重叠度,计算公式[1]如式(1)所示:
P = P’ + (1-P’)Δh/H (1)
式中:p为要计算的位置的重叠度,p’是起降点重叠度,Δh为相对于起降点的高差,H为设计相对航高。
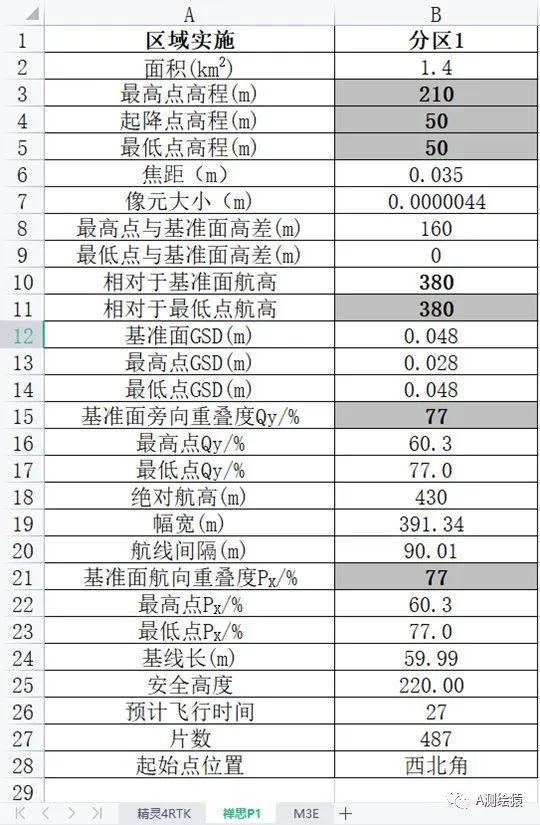
图1 航摄因子计算表
如图1所示,为便于航摄因子计算,笔者使用电子表格软件制作了适用于多款无人机的航摄因子计算表,表中有灰色底纹的数据为输入项,调整输入项数据后,电子表格即可自动计算出最高点、最低点的旁向重叠度、航向重叠度、地面分辨率等航摄因子。
大疆无人机支持仿地飞行[2],即无人机可根据DEM数据自动调整飞行高度,与地面保持大致不变的相对航高,此时重叠度直接设置即可。但考虑到飞行安全、飞行效率及后续的航空摄影测量立体采集[3],笔者一般不采用此种飞行方式。
1.3 地面分辨率
地面分辨率GSD的选择可参考常规航空摄影规范[1]的建议数值,1:500比例尺成图GSD优于8cm,1:1000比例尺成图GSD优于10cm。由于无人机航摄范围通常比较小,在安全的前提下可适当降低飞行高度、提高GSD,有利于提高测绘精度。
此外,旋翼无人机已经广泛应用于农地一体、竣工测量等项目,此类项目对平面精度要求优于5cm。根据生产经验,建议2倍的GSD不大于精度要求,即如果平面精度要求优于5cm,那么GSD不应大于2.5cm,以此类推。
1.4 相机曝光参数
适宜的相机曝光参数可以有效的提升航片的成像质量。相机曝光参数[4]有:光圈、快门和ISO。光圈数值越大,光圈越小,进光量越小,画面越暗;尽量不要用最大或最小光圈,会影响画质。快门时间越短,进光量越小,画面越暗。高ISO会使画面噪点明显增加,使用原生ISO成像较为纯净。
相机曝光模式通常有:Auto 挡(自动档)、S 挡(快门优先)、A 挡(光圈优先)和 M 挡(手动档)。由于无人机搭载的相机没有像移补偿,因此需要控制快门时间和飞行速度,以保证成像不拖影、不模糊。因此无人机航摄通常选择S档或M档。S档或M档均需要设置快门时间,建议其满足式(2)要求:
v×t<GSD/2 (2)
式中:v为无人机作业飞行速度,t为快门时间,GSD为设计地面分辨率。
为便于航摄外业,笔者通常选择S档。在天气条件良好的情况下,飞行速度设置为最大,快门时间即可计算得出。而在阴天的情况下,如果仍设置最快飞行速度,选择S档会导致光圈变大、甚至ISO增大,这样对成像质量不利。此时减小飞行速度、增大快门时间可以有效提升成像质量。
1.5 高程优化
大疆无人机具备特有的高程优化模式[5]。由于其机载相机均带有三轴云台,因此可调整相机俯仰角度。如图2所示,高程优化模式即在每个飞行任务完成后,从最后一个航点开始、将无人机前进方向对准摄区中心位置、将相机调整至斜向下45°、间隔一定的时间边飞边拍照片,直至摄区中心位置。将采集的斜视航片与底视照片一起进行空三加密解算即可有效提升高程精度,可满足1:500成图高程精度要求。
 图2 无人机飞行计划航线
图2 无人机飞行计划航线
2航摄外业
在航摄外业方面,最重要的就是安全问题。向空管部门报备和购买保险是无人机飞行前的必备条件。在无人机控制方面,大疆无人机的用户体验较好,无论从无人机的安装调试、还是飞行控制软件的操作都较为方便快捷。但由于长时间作业,难免会出现飞手麻痹大意、无人机硬件故障等情况,因此需要加强在飞行全过程中的安全检查,防患于未然。
2.1 起降点选择
建议在飞行计划制作阶段确定起降点位置。旋翼无人机的起降方式是垂直起降,因此起降点的选择较为简单,但在山区或者建筑物较为密集的城区,起降点选择较为困难。主要考虑两方面因素:
(1)周边环境是否安全,尽量选择行人和车辆较少的位置,周边相对比较空旷。尤其要注意空中的电线和树枝,因为无人机的避障系统无法识别电线这类截面较小的障碍物。
(2)在整个飞行过程中,遥控器与飞行器之间是否有障碍物。如果有摄区范围内的历史DOM和DSM,可以使用GIS软件中的通视分析功能评估起降点是否可用,或在CAD软件中大致绘制起降点、高大建筑和飞行器的相对关系,确定起降点是否可用。在飞控软件中可以打开RTK精度维持模式,如果遥控和飞行器之间有失联情况发生,RTK的精度会维持几分钟,恢复连接后RTK精度也同时恢复。
2.2 起飞前的安全检查
大疆无人机的产品集成性非常好,起飞前准备工作较少,几分钟即可达到起飞条件。但这也容易让飞手麻痹大意,不做必要的检查即放飞无人机,导致意外事故。因此笔者团队特制定《无人机飞行前安全检查清单》,包括项目、飞手及无人机登记、环境勘察、开箱检查、开机检查和航线检查等五部分内容,并将清单制作成钉钉App表单,加入我院的测绘项目线上管理系统。如图3所示,将表单链接输出为二维码,打印并粘贴在无人机运输箱上,强制要求飞手起飞前扫码进行飞行前安全检查,并填报提交清单。系统后台便可自动记录无人机航摄台账,为今后的项目管理和无人机维护保养提供可靠的基础数据。
 图4 无人机飞行安全检查表单手机截屏
需要特别注意的是,如果在一个摄区的多个分区内进行多架无人机同时作业,起飞前飞手们应充分沟通,优化分区作业顺序,保证多架无人机之间的安全距离,避免无人机空中相撞。
图4 无人机飞行安全检查表单手机截屏
需要特别注意的是,如果在一个摄区的多个分区内进行多架无人机同时作业,起飞前飞手们应充分沟通,优化分区作业顺序,保证多架无人机之间的安全距离,避免无人机空中相撞。
2.3 飞行过程中注意事项
无人机起飞后便会按照设计航线自动飞行、采集航片。但由于电子元器件老化或网络不稳定等问题时有发生,需要飞手时刻关注飞行状态,做到早发现早处理。重点关注以下三方面:
从无人机起飞就要开始关注电池状态,查看电池电流、电压是否正常,多电芯之间电压是否平衡。如遇到大风天气,无人机会提示“风速过大,谨慎飞行”。精灵4RTK的电池界面中显示电流值,根据经验如果电流持续超过20A,就必须马上返航,因为电流长时间过大会导致电池烧损、致使空中断电、无人机坠毁。大风天气航摄作业,应为无人机留足返航电量,否则无人机会在返航途中强制降落,造成不必要的麻烦和风险。
频繁快速读写会导致无人机使用的存储卡易损,造成整个架次的航片无法存储。因此开始采集航片之后,需要通过飞控软件上显示的已采集照片数、存储卡剩余空间来判断存储是否正常。如发现问题立刻停止飞行,返航后更换存储卡。
大疆无人机的遥控可以插入LTE终端,终端中插入SIM卡,移动网络较为稳定。为节省成本,还可以通过连接手机分享的网络热点。而这种网络连接方式的稳定性不如连接LTE终端,会因手机品牌、系统设置甚至遥控无线网络模块老化等原因导致遥控无法连接网络,导致RTK无法达到固定解。如果已经打开RTK精度维持模式,会导致整个架次的航片数据的pos精度较差,也就无法达到免像控。所以建议非必要不打开RTK精度维持模式,或者持续关注RTK状态,如出现在无任何障碍的情况下RTK精度维持模式仍被激活,就需要立即返航,排查网络连接问题。
2.4 返航与降落
大疆无人机有智能返航功能[6],即飞控软件会实时的自动计算剩余电量是否足够安全返航,若不够,会立即触发无人机自动返航。智能返航后如遇到大风天气,无人机顶风飞行,电量消耗过快,有可能导致无人机在返航途中强制降落,最终导致与无人机失联甚至坠毁。这种情况下,在无高大障碍物的前提下,可以在触发智能返航之后边飞行边降低飞行高度,为返航节省宝贵的电量。
在长时间、高频次的飞行后,精灵4RTK后方的两个螺旋桨下方的外壳容易产生裂缝,需要多加关注。因此无人机落地后要立即检查无人机外壳和螺旋桨是否有损坏。另外,需要用双手分别握住前方两个和后方两个螺旋桨电机,如果两个电机的温度差别较大,极有可能是其中一个电机受损,需返厂检修。
3数据预处理
大疆无人机的原始航摄数据中[6],厘米级精度的pos数据以经纬度和大地高的形式储存在每张照片里。如果飞行时使用的是无人机自带的RTK服务、千寻定位服务或是移动CORS服务,处理数据时可以直接使用照片里的pos数据。但如果使用的是自建CORS站、需要进行坐标转换才可以得到厘米级精度的pos数据,就需要从照片中批量提取pos数据,然后导入坐标转换软件、输出厘米级精度的高斯平面直角坐标。
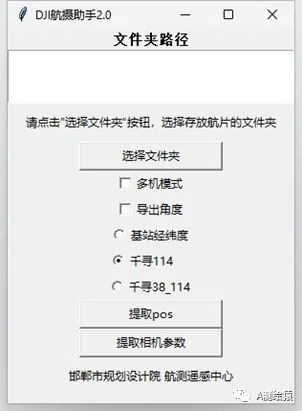
为此笔者使用python语言编写了数据预处理工具DJIMate,除了提取pos功能以外,还可以从照片中提取相机出厂参数,作为后续空三加密处理时的先验数据,可以显著提高空三加密的成功率。
图5 数据预处理工具DJIMate2.0
针对多分区、多无人机、多天、多架次的航摄数据,需要明确每张航片的拍摄无人机、拍摄日期,且文件不能重名,因此需要在正式处理数据前对原始数据进行批量预处理。基于这种需求,笔者为数据预处理工具DJIMate增加“多机模式”,如图4所示,能够一键完成批量重命名航片、提取pos并将所有照片存放到以分区名称命名的文件夹下。其要求数据的存放目录结构为:根目录->工作日期文件夹->无人机文件夹->架次文件夹。重命名后的航片方便溯源,例如,4号M3E无人机2023年4月16日采集的原始航片文件名为DJI_20230416103245_0002_V.jpg,重命名后的航片文件名为M3E4_20230416103245_0002_V.jpg。
4结束语
旋翼无人机由于其飞行灵活度较高、操作简便易用,已在各行各业得到了广泛的应用。但简便易用的同时,容易使其使用者放松对无人机飞行安全的高度警惕、丧失对测绘工作的严谨态度,最终导致不必要的经济和名誉损失。笔者基于多年的无人机航空摄影内外业工作经历,总结了无人机航空摄影内外业全流程中需要注意的关键环节,希望可以和同行进行交流。
参考文献:
[1] 中华人民共和国国家质量监督检验检疫总局,中国国家标准化管理委员会GB/T 27920.1-2011 数字航空摄影规范 第1部分:框幅式数字航空摄影[S]. 北京:中国标准出版社,2012.
[2] 深圳市大疆创新科技有限公司. PHANTOM4 RTK 用户手册[Z]. 深圳:深圳市大疆创新科技有限公司,2021.
[3] 张剑清,潘励,王树根. 摄影测量学[M]. 2版. 武汉:武汉大学出版社,2009.
[4] 杨绍先. 摄影技术与艺术基础[M]. 北京:高等教育出版社,2004.
[5] 深圳市大疆创新科技有限公司. ZENMUSE P1 用户手册[Z].深圳:深圳市大疆创新科技有限公司,2021.
[6] 深圳市大疆创新科技有限公司. DJI MAVIC 3E/3T 用户手册[Z]. 深圳:深圳市大疆创新科技有限公司,2022.
声明:因本站是虚拟物品一旦购买概不退款,请谨慎购买!
加微信:139 5099 9860 拉客服进一个微信群,即可免费获得一个年会员!
任何个人或组织,在未征得本站同意时,禁止复制、盗用、采集、发布本站内容到任何网站、书籍等各类媒体平台。如若本站内容侵犯了原著者的合法权益,可联系我们进行处理(gf#celiang.net 请把#替换成@)。