

全站仪任意点架设仪器测高程的各种方法
本人常用的方法是架设仪器到任意点(高程坐标均未知)
1、将仪器高输为0,棱镜高为1.2m(实际棱镜的高度)。
2、测出后视已知点和架设仪器点的高差。
3、用后视已知点高程+、-测量出的高差得出一高程,将此高程输入到仪器的测站点高程,仪器高继续为0。返测后视点,OK,进行现场抄平。不知道我的这种方法对不?
小弟有个问题在此向各位测量前辈们讨教:
已知后视点高程,任意点架设全站仪,输入实际的棱镜高、仪器高、怎么推算出架仪器点高程(不是视线高)?我用后视高程+棱镜高+、-仪器测出的高差-仪器高=怎么算出来不对哦。
请各位测量人员说说你们在现场是如何任意点架设仪器,测高程的,方法很多。哪种方法精度最高?麻烦说出具体的操作步骤。
请大家充分发表高见,博主7日后在此发表自己的看法。
————————————————————————————————————————————————————————————
博主小结:
说实话,关于全站仪高程测量这个问题,我以前还没有很仔细地琢磨过,也没有深刻的实践经验,但自从几天前网友5678把这个问题抛出以后,大家讨论得非常热烈,到此时为止,短短6天时间,就有近900人浏览,近60楼的回复。当然,也有网友不以为然,认为此话题太“低级”。
那么,到底这个话题怎样呢?我作为博主,占有在此可图文并茂发表文字的优势,就发表一点自己的拙见,就当对本日志、对各位网友回复的一个总的回复吧。
问题的分析
我个人认为,从大家热烈讨论的程度,从各抒己见阐述自己的方法来看,这个问题值得讨论,我对大家的回复都一一作了认真的阅读和理解,我觉得这个问题至少要敲定以下几点:
1.使用全站仪进行高程测量,到底有多少种可行的方法,相关的测量原理是什么?
2.每种方法的优势和不足是什么?各自适用性如何?
3.每种方法的测量精度如何?
我想,关于全站仪测量高程,若能细化为以上三点,并探索求解,就可以充分地说明,这个主题绝不“低级”。
现在我就来“摆摆龙门阵”,继续往下聊。
这里我只针对以上第1、2点做出阐述,第3点精度问题,以后有时间进一步琢磨了再专门说说。
全站仪高程测量的方法
全站仪测量高程到底有几种方法。根据我以往的理解,再参考了大家的热烈讨论,我个人认为,可以归结为三种,我暂且定义如下(并不一定地道,但大家能理解就行了)
方法一:经典方法,全站仪在已知坐标(含高程)点上设站;
方法二:后方交会,全站仪在任意点上设站;
方法三:对边测量,全站仪测两点高差。
本日志的开头,网友5678提出的方法就是方法二。
下面对三种方法进行阐述:
方法一:经典方法
先说方法一。说这个方法是经典方法,是因为:
1.其测量原理我们在学习经纬仪视距测量时就学习过,每种测量教材中都有;
2.测量教材中有关全站仪高程测量原理,都按此原理进行阐述;
3.全站仪高程测量的相关设置,都按此原理进行的。
到底什么测量原理呢,我们来回顾一下,看下图:
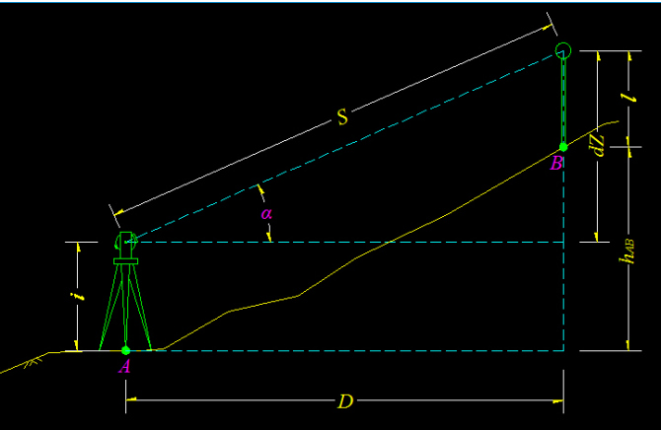
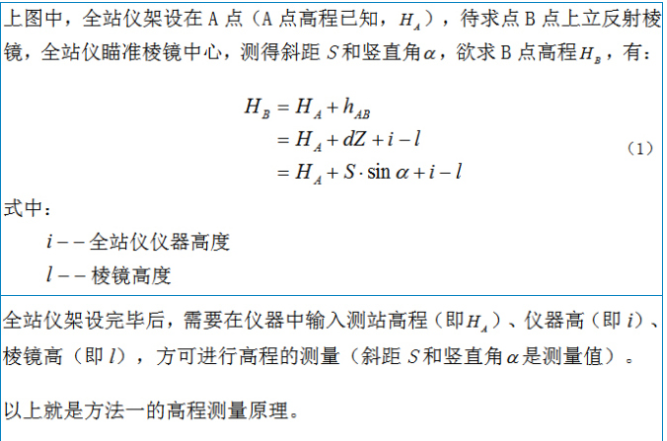
我们从(1)式中可以发现,全站仪一旦设站完成,测站高程和仪器高度均为定值,若测量过程中不改变棱镜高度,则除了Ssina(即实测参数)外,等式右侧其它各参数之和均为恒等值,由此我们可以得出:
全站仪一旦设定,同时不再改变棱镜高度的话,全站仪对各点的测量高差,其实质是每个三角高差dZ的差值
这个结论我们先记住,它将是后面方法二和方法三的理论基础。
方法二:后方交会
说实话,我也不知道叫“后方交会”是否准确,因为这个名字一般是指:在全站仪平面测量时,全站仪自由设站,通过测量并输入测站外两个已知点的平面坐标,从而完成设站的工作。
而这里是指全站仪在高程测量前,全站仪自由设站,通过测量测站外一个已知高程点,再通过全站仪相关的设置,从而完成全站仪高程测量设站的工作。
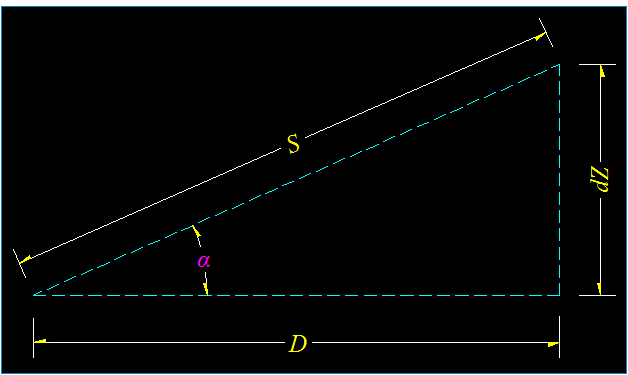
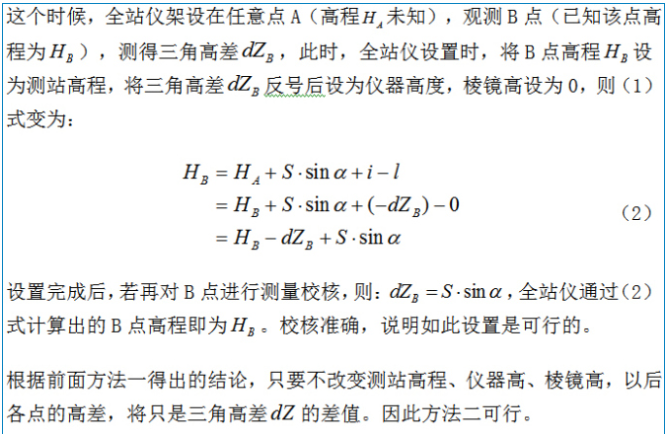
我们还是继续对照着这老图进行分析:

方法三:对边测量
方法三的测量方法是一个纯粹的高差测量,操作也相当简单:全站仪架设在任意位置,不做任何高程测量的设置(即测站高程、仪器高、棱镜高均使用仪器内存值),分别对两个点测量其三角高差dZ(要保证棱镜高度不变),两者之差即为两点之高差,跟水准测量的后视减前视相反,这里应该是前视减后视。其测量原理,在方法一中已经验证,在此不再赘述。
各种方法的适用情况:
方法都出来了,都有测量原理,都是可行的,如果硬要说哪种方法好,本身这个问题就是个伪问题,因为每种方法各有优势,如果不结合实际情况,便不能确定到底哪种方法要好。因此最后来谈谈各种方法的优势和不足,以及它们的适用情况。
方法一是经典方法,原理明确,地球人都知道,而且全站仪的高程测量设置也是据此设置和计算,操作时按部就班,不容易出错,很多人都喜欢用它。缺点正如很多网友所说,仪器高度量取时误差较大,因此比较适用于初学者(按原理操作),以及对高程精度要求不是很高的情况(比如路基填挖施工)。改进的方法也有,正如很多网友说的,设置完成后,对后视已知高程点进行检验的时候,根据测量值和已知值的差异情况,调整仪器高度,直至差异小到满足要求为止。
方法二的优点是能在任意点上设站,不需要知道测站点高程而进行高程的测量,这个非常适用于进行三维测量时,平面也同时自由设站的情况,因此使用非常灵活,适应性强。缺点是设置的时候,不是按照参数的原意进行设置,比如输入测站高程,需要输入后视点高程,输入仪器高度时,输入测量三角高差的反号值等等,这个用长沙话来讲,叫做“转范子”,这时候头脑要保持绝对的清晰。而且,根据“测站高程+仪器高-棱镜高”为恒等值的原理,实际操作中参数输入有无数种组合,比如:
1.后视点高程—>测站高程,后视点三角高差反号—>仪器高,0—>棱镜高
2.后视点高程-后视点三角高差—>测站高程,0—>仪器高,0—>棱镜高
3.后视点高程—>测站高程,0—>仪器高,后视点三角高差—>棱镜高
……
等等,只有想不到,没有做不到,所以大家不要再争论如何“转范子”输入参数了,只要满足“测站高程+仪器高-棱镜高”为恒等值这个条件,哈是可以的。
方法二的拥趸者,主要的自豪点在于免除了仪器高和棱镜高的量取,特别是避免了量取仪器高的误差,因此,即使在已知点上架设仪器,他们也会采用方法二来设置仪器。
方法一和方法二的共同点,就是通过测量能直接获得测点的高程,因此适用于在一个测站上获取若干多个点高程的情况,比如地形碎部点测量、路基施工放样等。
方法三的特点是,避免了啰嗦的全站仪高程测量设置,神马都不用,只在距离测量模式中读取各点的三角高差dZ,通过各点dZ之差计算各点高差,跟水准测量类似,甚至可以直接使用水准测量的记录表格。不足之处在于不能直接测量获取各测点高程,还得象水准测量计算那样进行下一步的推算。因此,方法三如果用于地形碎部点测量、路基施工放样等情形就麻烦多了,但方法三可适用于水准路线的测量,以及在一个测站不需测量多个测点的情形。