
土方工程在整个建筑施工项目中占据着重要地位,其计算准确性直接影响着整个工程施工进度及造价预算,如何高效准确进行土方计算成为当今研究的热门话题。无人机倾斜摄影测量技术能够快速获取数据,通过建立数字高程模型实现土方量快速计算。当前,围绕土方量计算及无人机在土方工程中的应用等问题,众多研究人员已取得一些阶段性成果。总体上现有研究较好地促进了无人机倾斜测绘技术在土方工程中的发展,在土方计算方法和自动化建模等方面研究较多,但现有研究对精度影响因素分析较少,如控制点布设、点云分类和非地面点高程改正等影响因素。随着无人机相机分辨率与续航能力的不断提升,无人机倾斜测绘技术越来越多应用于土方工程项目中,如何快速精确的进行高精度土方计算仍然值得探讨和研究。
本文将结合PhotoScan软件对土方计算流程进行详细阐述,对比分析控制点布设、点云分类方法和非地面点高程改正方法等因素对土方计算精度的影响,并结合RTK技术计算得到的土方量对基于无人机倾斜摄影计算的土方量进行精度检核,旨在通过对精度影响因素进行分析以优化土方计算流程、提升计算精度,从而缩短土方计算时间、降低生产成本。
1.1无人机倾斜摄影测量土方计算流程
1.1.1外业数据采集
根据现场踏勘进行航高设计及航线设计,利用多旋翼无人机搭载多镜头相机从多视角同步采集地表数据,通过搭载POS/IMU平台获取飞行过程中的实时位置信息,并利用RTK设备进行地面点数据采集。
1.1.2内业土方计算
结合PhotoScan软件对测区边界外多余影像数据进行剔除,利用POS数据与地面控制点数据进行影像匹配和联合平差,生成稀疏点云数据。通过对稀疏点云进行点云加密得到密集点云数据,利用点云分类方式细化出地面点和非地面点,并基于高程改进方法进行非地面点高程改正,联合改正后的地面点和非地面点构建数字高程模型(DEM),最后通过导入测区和设计标高进行土方计算。
本文利用DjiMatrice600多旋翼无人机进行数据采集,结合PhotoScan软件对数据进行处理以构建出数字高程模型,并进行土方计算。其具体流程如图1所示。
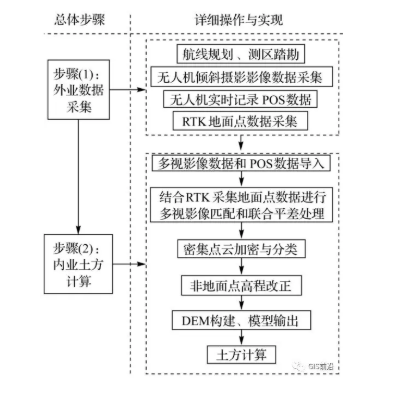
图 1 工作流程
1.2无人机倾斜摄影土方计算关键技术
本文在介绍无人机倾斜摄影测量土方计算流程的同时,着重对密集点云分类方法和非地面点数据高程纠正方法进行研究,并对其计算结果进行分析对比,以提高土方计算精度。其关键技术如下:
(1)密集点云分类。生成的密集点云包含大量树木、建筑物等非地面点数据,若直接利用数据进行计算,会使得该部分计算高程明显大于实际高程,从而导致计算结果出现较大的误差,因此进行点云数据的分类,准确的区分出各类地物显得至关重要。测区各类型地物点数据往往不是均匀分布,如何准确识别出各个地物类型的边界范围线,快速准确地构建建筑物、高大植被、湖泊等分类区,是土方计算数据分类的难点。
(2)非地面点高程改正。当测区覆盖大量的植被、建筑物等非地面点数据时,会导致所获取的数据无法真实反映地面起伏变化。若直接舍弃植被、建筑物等非地面点坐标进行内插求算土方,内插部分会产生较大的高程误差,且无法真实表现地面高程起伏,而土方计算的目的是获取地表真实的标高和设计标高之间的真实差值,因此需要笔者对非地面点高程值进行修正,使得其能够最佳的逼近真实高程值坐标。由于测区覆盖的植被树木和建筑物等非地面点数据往往高低不一,如何利用抽样测量的方式得到植被树木最佳逼近值,如何对测区覆盖的建筑物利用临近区域高程进行差值计算获得其地面点高程是进行非地面点高程纠正的难点。
(3)土方计算精度分析。土方计算的精度会对整个工程的施工控制、成本管理等产生直接影响,对土方精度进行分析优化使土方计算结果能反映真实地貌特征显得尤为重要。不同测区其地形地物特征都千变万化,如何通过对其影响因素进行分析得出各个要素对精度的影响情况,提出各个影响因素的最优化方案以提升土方计算精度,这是土方计算精度分析的主要目的和难点
2.1工程概括
某测区面积约为50km2,呈狭长形,南北长约500m东西宽约100m。如图2所示,测区地形复杂,植被高大茂盛,建筑物错落分布,坡度起伏较大,测区部分高程差接近35m。

图 2 测区实景
本文工程使用DjiMatrice600电动多旋翼无人机,通过搭载五镜头高分辨倾斜相机进行同步影像数据采集,并搭载高精度IMU/POS装置对无人机位置信息进行实时记录,并利用RTK设备进行地面点数据采集。航摄所用无人机平台与搭载传感器参数见表1。

2.2数据采集
本文项目通过现场踏勘,并结合《低空数字摄航空摄影测量外业规范》要求,确定飞行规划如下:飞行区域共规划航线10条,地面采样间距3cm,航线内线性渐变飞行高度设置为150m,测区设置旁相重叠度70%,航向重叠度80%,获取航片数据800余张。同时,本文项目采用均匀布点的方式在测区范围内布设地面控制点22个,保证每个控制点能在多张像片上找到,并按照10m的采样间距进行RTK野外点位数据采集,对部分高程起伏较大的区域进行适当加密采集。
2.3土方计算
本文项目结合PhotoScan软件进行影像数据处理与土方计算,其主要流程如下:
(1)多视影像匹配与联合平差。在PhotoScan软件中,导入无人机航摄所获取的影像数据、POS坐标数据,结合控制点实景照片完成刺点,通过导入控制点数据进行联合平差处理生成稀疏点云。
(2)密集点云分类。对稀疏点云数据进行点云加密生成密集点云数据,这些数据往往包含一定的噪声,同时各类地物数据混杂无法进行高程值修正,因此需要进行点云数据分类。点云分类分两步:自动分类和目视修正。在进行自动分类前需要进行最大角度、最大距离和单元格大小等参数设置,其中最大距离是指有关点与地形模型之间距离,该参数确定了最大地面高程变化的情况;最大角度是指地形模型与将该新点与地面点构成连线之间的夹角,该参数确定了单元大小内的地面最大坡度情况;单元格大小是指要划分为点云的小区大小,该参数根据不包含任何地面点的最大区域大小来划分。由于测区分布较多的低矮植被且地形起伏较大,因此将密云被分成大小50m的单元格,将与地形模型相距距离设置为1m,地形模型与将该新点与地面点连线之间的夹角设置为15°。利用自动分类功能判断3个参数值与检测点的差值,当小于预定的3个参数值时,该点将被分类为地面点数据,自动分类结果如图3所示。

图 3 点云自动分类
同时,通过实地踏勘和实景照片对比可以发现,自动分类的点云数据存在一定的错误分类,如将植被识别成地面点、将地面点识别成楼面点等,这些数据的错误识别会对后期的土方计算造成影响,在计算前需要进行一定的纠正。本次试验采用目视纠正分类方法对自动分类结果进行纠正,对于错分类地物点进行重新分类。同时将分类图与实景照片进行叠加,实现对非地面点云细化分类,创建高大植被、低矮植被、建筑物、湖泊等新数据类型。目视纠正后分类结果如图4所示。
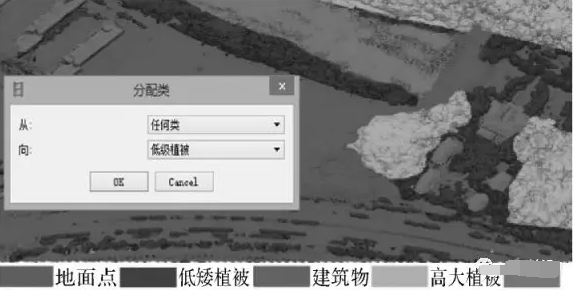
图 4 目视纠正分类结果
(3)分类点高程修正。由于测区覆盖大量的树木,同时交错分布着大量建筑物,而土方计算是为了反映地表的真实情况,树木和建筑物会对计算结果产生较大的影响。本次试验通过实地抽样量测方式求取测区范围内植被以及建筑物的平均高度,主要修正过程如下:
①建筑物:研究区建筑物较多且高度不一,因此需要进行单个平差处理。本次项目利用全站仪进行建筑物高度量测,并利用RTK采集部分建筑物临近区域点位坐标,从而进行联合平差处理,求取出建筑物地面高度改正值,实现对建筑物高程改正。
②植被:试验区植被根据树木高度差异主要分为低矮植被和高大树木两类。利用抽样调查的方式,对测区部分植被数据进行实地量测,通过求取平均值的方式确定试验区低矮植被平均高度约为2m,高大树木平均高度约为6m,因此,统一对分类后的植被高程值对应进行平差处理,从而得到近似的植被地面点坐标。
(4)数字高程模型(DEM)生成与土方计算。利用高程修正后的点云数据生成DEM数据,如图5所示。确定出测区边界线,利用PhotoScan软件体积量测功能,选择自定义标高的模式,通过输入设计标高40m进行体积量测,计算结果如图6所示。通过计算可知,该测区挖方量为48706.3m3,填方量为17941.5.1m3,该测区净填方量为30764.8m3。
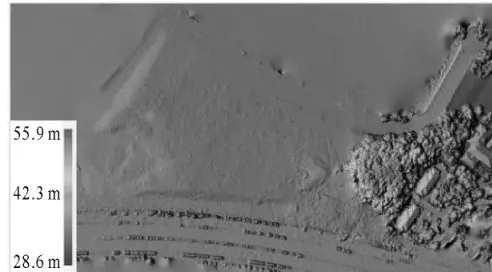
图 5 数字高程模型

图 6 土方计算
3.1与传统方法对比
为验证土方计算的准确性和可靠性,本文项目通过RTK均匀采点的方式进行地面数据点采集,并对测区部分起伏较大区域进行数据点加密采集,结合南方CASS9.0中的格网法土方计算功能,对设计场地的土方填挖方量进行复核计算,其计算结果见表2。
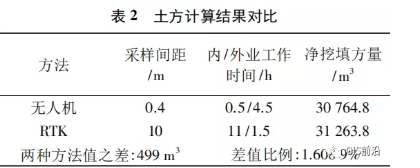
通过试验结果分析对比可知:
(1)利用无人机倾斜摄影测量方式进行土方计算能够在一定程度上节省内外业工作时间,提高工作效率。
(2)通过对RTK实测数据计算结果和无人机倾斜摄影测量计算结果对比,挖填方量差值比为1.6089%,能够满足土方计算的规范要求。
3.2精度影响因素分析
3.2.1点云分类与高程修正因素
本文从以下3种情况进行分析,研究点云分类和高程修正对DEM构建及土方计算精度的影响:
①利用未分类密集点云构建DEM计算土方;
②利用分类地面点内插构建DEM计算土方;
③利用修正后的分类点构建DEM计算土方。通过对这3种情况分别进行试验,生成的DEM与反映测区高程起伏情况的横截面情况如图7所示。同时,设定相同的设计标高和测区范围,结合PhotoScan软件对3种方法生成的DEM数据进行土方计算,其计算结果见表3

图7 3 种方法生成的DEM与横截面高程

通过对DEM数据、横截面高程分布及土方计算结果进行分析对比,可以得出以下结论:
(1)由于测区覆盖着大量的植被和建筑物等非地面点数据,这些数据高程值明显大于实际地表高程值。当利用这些点未分类点参与土方计算时,会导致其挖方量明显大于实际的挖方量,产生较大的计算误差。
(2)利用地面点内插非地面点时,由于测区起伏较大且较为复杂,内插点难以真实地反映地面起伏情况,导致所插值点高程明显低于实际高程值。利用这些差值点计算土方时,会使得挖方值明显小于实际值,而填方值明显大于实际值。
(3)利用修正后的点云数据参与土方计算时,由于高程改正后的非地面点数据能够最大限度地反映真实地面起伏情况,在一定程度上削减了植被和建筑物等地物对计算结果的影响,使得挖填方计算值与实际值较为接近。
3.2.2控制点因素
本文从控制点数量及布设情况进行分析,研究控制点对土方计算精度的影响。通过反复对控制点个数和布设进行调整,并与外业采集RTK数据点进行精度对比分析,可以得出以下布设优化原则:
(1)采用POS数据和控制点联合平差可以在一定程度上提高坐标点位精度,提升土方计算精度。
(2)根据多次试验得出,地面控制点应尽量分布均匀在四周,每平方千米布设6~8个像控点便可达到较高的控制精度,但当测区小于1km2时,应尽量在四周均匀布设不少于4个控制点。
(3)随着布设地面控制点数量的增加,土方计算精度逐渐趋向于稳定分布,因此,布设过多的地面控制点对于土方精度提升并无显著作用。
土方工程量计算精度是土方工程的重要环节之一,对整个项目施工进度控制和成本控制有重要的影响。本文研究了基于无人机倾斜摄影测量土方计算方法,并结合实际工程案例,从不同方面探讨了土方计算的精度问题:如何优化地面控制点数量和布设方式以提高计算精度;如何优化点云分类方式和高程值改正方式以得到最贴合地面高程点数据从而真实反映地面高程信息。在地面控制点选择方面,通过反复试验得出控制点数量选择与布设方式参考3大原则以提升土方计算精度;在点云分类和高程值修正方面,通过对测区非地面点数据细化分类,利用抽样量测方式进行平差处理,从而得到最优化分类和改正方案。结果表明,利用无人机倾斜摄影测量进行土方计算,不仅不受场地障碍的影响,外业时间短、工作效率高、快捷方便,而且能够简化内业操作流程,实现一体化土方计算。同时,通过对地面控制点的合理布设、点云分类和高程值修正优化等处理,能够在一定程度上优化无人机倾斜摄影测量土方计算流程,提升土方计算精度,较好地解决复杂地区植被和建筑物等地物遮挡对土方计算精度的影响。