1、大地控制点分类
大地控制点有:
a)国家级CORS站点
b)2000国家GPS大地控制网点
c)国家一、二、三、四等天文大地点
d)省级CORS站点
e)省市级卫星大地控制网C级、D级点
f)其他1954年北京坐标系、1980西安坐标系及相对独立的平面坐标系下的控制点
2、控制点用途
高等级控制点可用于低等级控制网的外部控制;可用于1954年北京坐标系、1980西安坐标系坐标成果转换为2000国家大地坐标系坐标成果时计算坐标转换参数。
a)国家级CORS站点:可作为省级CORS网建设的控制点。
b)省级CORS站点:可作为省级、市、县城市基础建设控制网点。
c)2000国家GPS大地控制网点:可作为天文大地点控制点及相对独立坐标系建立控制点。
d)省市级卫星大地控制网C级、D级点:相对独立坐标系建立控制点。
e)国家一、二等天文大地点:可作为三、四等天文大地点的控制点使用。
f)国家三、四等天文大地点:可作为测图控制点使用;三等及以上天文大地点坐标成果可作为像控点的起算点。
3、.控制点坐标转换模型
(1)不同空间直角大地坐标系间的变换
不同地球椭球基准下的空间直角大地坐标系统间点位坐标转换,换算公式为布尔沙模型。涉及七个参数,即三个平移参数,三个旋转参数和一个尺度变化参数。
(2)不同大地坐标系间变换
a)三维七参数坐标转换模型:用于不同地球椭球基准下的大地坐标系统间点位坐标转换,涉及三个平移参数,三个旋转参数和一个尺度变化参数,同时需顾及两种大地坐标系所对应的两个地球椭球长半轴和扁率差。
b)二维七参数转换模型:用于不同地球椭球基准下的椭球面上的点位坐标转换,涉及三个平移参数,三个旋转参数和一个尺度变化参数。
c)三维四参数转换模型:用于局部坐标系间的坐标转换,涉及三个平移参数和一个旋转参数。
d)二维四参数转换模型:用于范围较小的不同高斯投影平面坐标转换,涉及两个平移参数,一个旋转参数和一个尺度参数。对于三维坐标,需将坐标通过高斯投影变换得到平面坐标,再计算转换参数。
e)多项式拟合模型:用于全国/全省或相对独立的平面坐标系统转换。
4、不同空间直角大地坐标系间的变换模型
适用于不同地球椭球基准下的空间直角大地坐标系统间点位坐标转换。转换公式
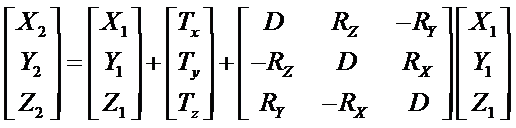
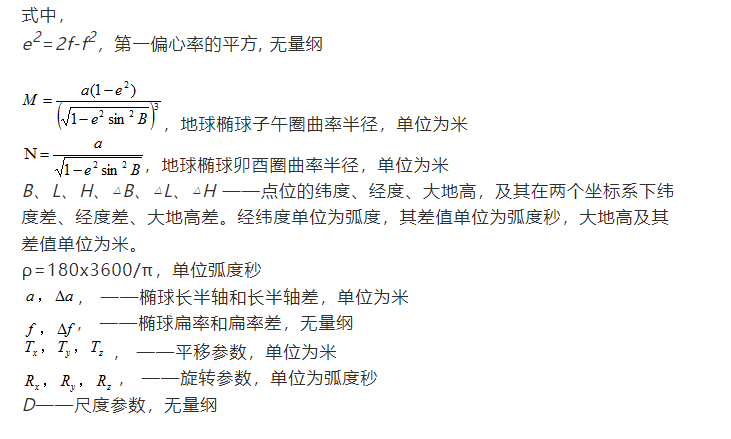
式中,
X1,Y1 ,Z1 ——原坐标系坐标
X2,Y2 ,Z2 ——目标坐标系坐标
Tx,Ty ,Tz,D ,Rx ,Ry ,Rz ——七参数
5、三维七参数坐标转换模型
不同地球椭球基准下的大地坐标系统间点位坐标转换。转换公式为:

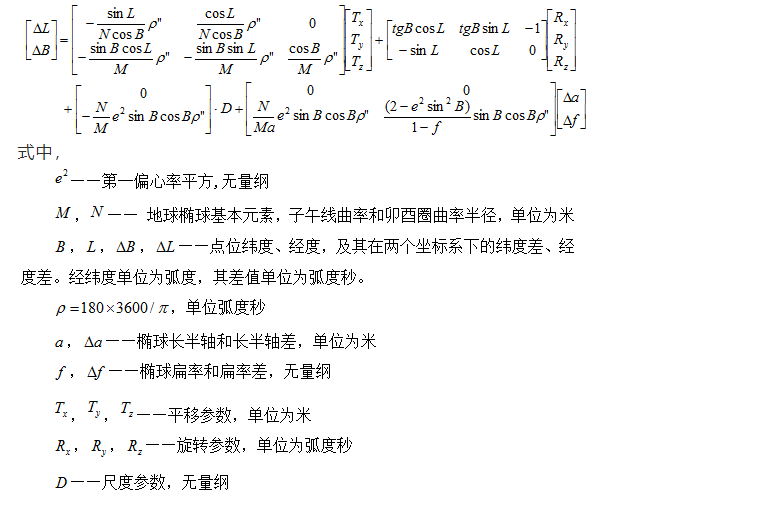
6、二维七参数转换模型
不同地球椭球基准下的大地坐标系统间点位坐标转换。对于1954年北京坐标系、1980西安坐标系向2000国家大地坐标系的转换,由于这两个参心系下的大地高的精度较低,建议采用二维七参数转换。转换公式为:
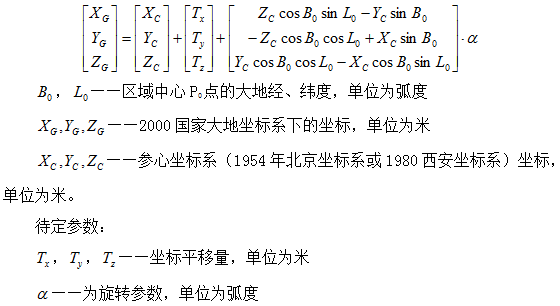
7、三维四参数转换模型
用于局部1954年北京坐标系或1980西安坐标系向2000国家大地坐标系间的点位坐标转换。采用Tx,Ty ,Tz 3个坐标平移量和1个控制网水平定向旋转量 作为参数。是以区域中心P0点法线为旋转轴的控制网水平定向旋转量,顾及1954年北京坐标系或1980西安坐标系平面坐标由于起始定向与2000国家大地坐标系的差异引起的坐标变化。
8、二维四参数转换模型
用于范围较小的不同高斯投影平面坐标转换。转换公式为:

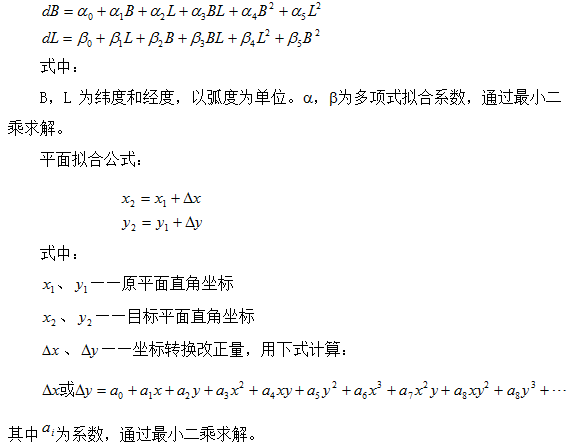
9、多项式拟合模型
不同范围的坐标转换均可用多项式拟合。但转换后的精度需进行检核。实用中有两种形式,椭球面上和平面表现形式。椭球面上适用于全国或大范围的拟合;平面拟合多用于相对独立的平面坐标系统转换。
椭球面上拟合公式:
10、坐标转换精度估计
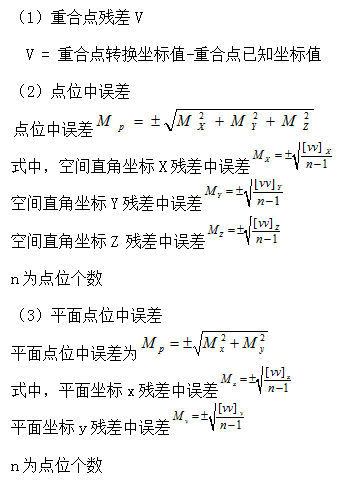
(1)重合点残差V
V = 重合点转换坐标值-重合点已知坐标值
(2)点位中误差
点位中误差 式中,空间直角坐标X残差中误差 空间直角坐标Y残差中误差 空间直角坐标Z 残差中误差 n为点位个数
(3)平面点位中误差
平面点位中误差为 式中,平面坐标x残差中误差 平面坐标y残差中误差 n为点位个数
11、控制点坐标转换模型适用范围
a)三维七参数转换模型:适用于全国及省级椭球面3°及以上不同地球椭球基准下的大地坐标系统间控制点坐标转换。
b)二维七参数转换模型:适用于全国及省级适用于椭球面3°及以上不同地球椭球基准下的大地坐标系统间控制点坐标转换。
c)三维四参数转换模型:适用于省级以下或局部2°以内局部范围控制点坐标转换。
d)二维四参数转换模型:适用于省级以下控制点平面坐标转换、相对独立的平面坐标系统与2000国家大地坐标系的联系。
e)多项式拟合模型:椭球面上适用于全国或大范围的拟合;平面拟合多用于相对独立的平面坐标系统转换。
12、控制点坐标转换方法
在控制点坐标转换过程中,涉及到1954年北京坐标系、1980西安坐标系、WGS84坐标系、2000国家大地坐标系间的参考椭球基准及参数。
(1)重合点选取原则
选用两个坐标系下均有坐标成果的控制点。选取的基本原则为等级高、精度高、局部变形小、分布均匀、覆盖整个转换区域。
(2)转换参数计算
a)利用选取的重合点和转换模型计算转换参数;
b)用得到的转换参数计算重合点坐标残差;
c)剔除残差大于3倍点位中误差的重合点;
d)重新计算坐标转换参数(重复上述a)、b)、c)计算过程),直到满足精度要求为止;
e)最终用于计算转换参数的重合点数量与转换区域大小有关,但不得少于6个;
f)根据最终确定的重合点,按照转换区域范围,选取适用的转换模型,利用最小二乘法计算转换参数。
(3)坐标转换
利用计算的转换参数,进行坐标转换。
(4)精度评价
坐标转换精度可采用内符合和外符合精度评价,依据计算转换参数的重合点残差中误差评估坐标转换精度,残差小于3倍点位中误差的点位精度满足要求。
内符合精度计算公式参见第7节;外部符合精度检核方法如下:
a)利用未参与计算转换参数的重合点作为外部检核点,其点数不少于6个且均匀分布;
b)选择由转换参数计算的点位坐标与其已知点位坐标进行比较与外部检核。
13、CORS站点坐标归算方法
适用于GNSS点坐标归算到2000国家大地坐标系的计算方法。
(1)基准控制点选取
选取周边稳定的IGS站、国内IGS站及国家级CORS作为省级CORS最高级基准控制站。选取原则有:
连续性:测站连续观测近3年(或以上);
稳定性:站点坐标时序稳定性好,具有稳定、可知的点位速度;
高精度:速度场精度优于3mm/y;
多种解:至少3个不同分析中心的速度场残差优于3mm/y;
平衡性:站点尽量全球分布;
精度一致性:站点位置和速度的精度应当一致。
(2)数据处理
采用国内外成熟的高精度数据处理软件对CORS站数据进行处理与平差,获得各站点在现ITRF框架、观测历元下的位置和基线向量。省级CORS站作为省级2000国家大地坐标系框架基准,需将相邻省的CORS站纳入本省CORS一同处理。
(3)板块运动改正:
计算框架所对应历元下坐标从观测历元到需转换历元之间,由于板块运动引起的坐标变化值。转换公式: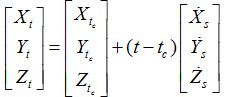
转换时需要站点运动的速度场信息,可由格网速度场内插得到。
(4)框架转换
历元归算:不同ITRF框架对应的历元不同,需将不同ITRF框架下各参数归算到同一历元下。框架间如无直接转换关系,可按间接方法转换。
框架点坐标计算:转换公式参见第12节。
(5)精度评估
转换后的坐标精度在3cm以内。
14、其它点的转换
水准点、像控点、重力点的坐标转换依据控制点转换方法进行转换,转换后精度应满足实际应用需求。
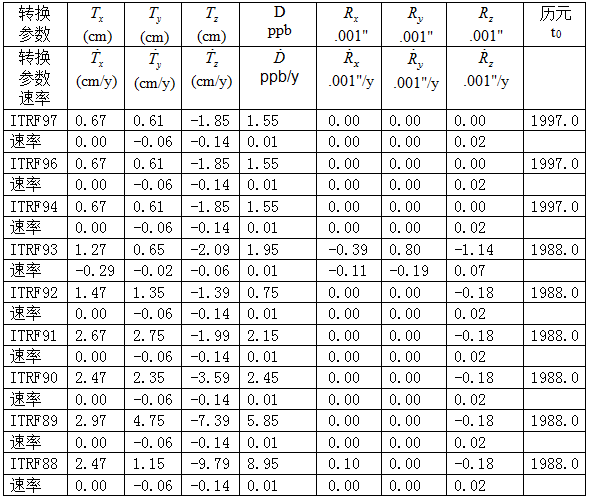
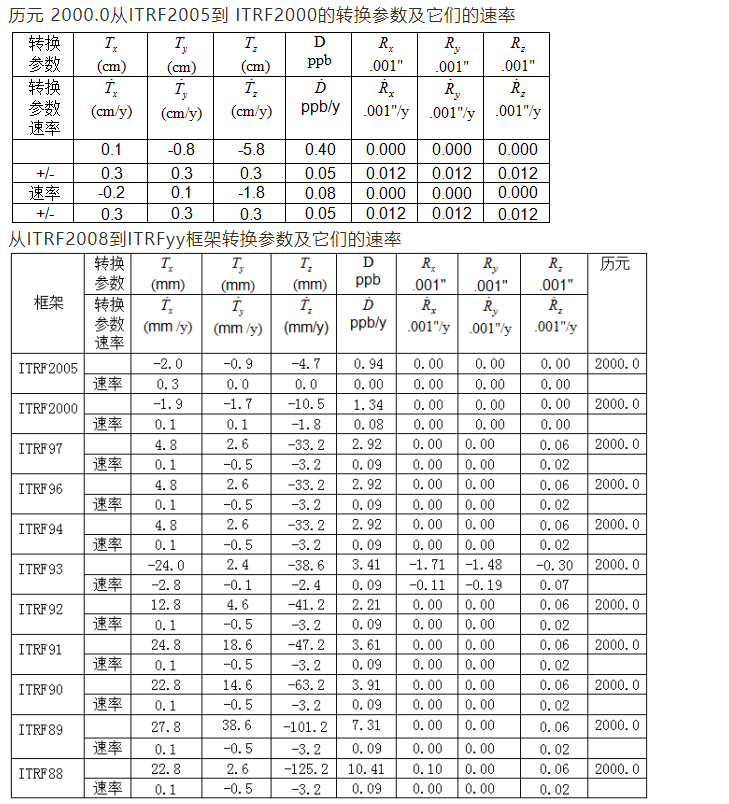
15、国际地球参考框架之间的转换
目前的ITRF已有ITRF88,ITRF89,ITRF90,ITRF91, ITRF92,ITRF93,ITRF94,ITRF96,ITRF97,ITRF2000,ITRF2005,ITRF2008。常用的有ITRF94,ITRF96,ITRF97, ITRF2000,ITRF2005,ITRF2008。
ITRF框架之间的转换采用公式: